About Me
I am currently a doctoral fellow advised by Prof. Marco Hutter and Prof. Andreas Krause at ETH AI Center, Switzerland. Before that, I received my master’s degree in Robotics, Systems and Control from ETH Zurich and my bachelor’s degree from Tongji University.
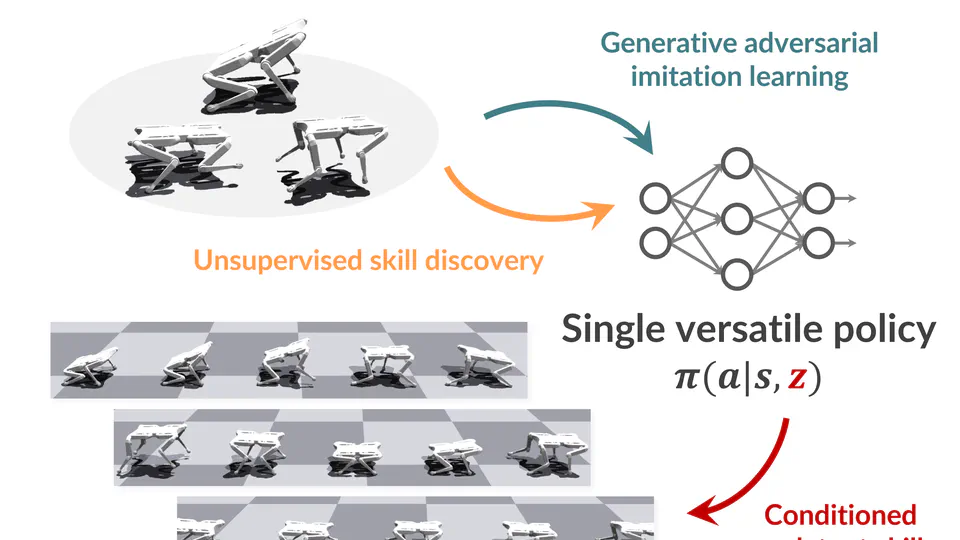
During my master studies, I worked on structured motion representation and active learning methods at the Biomimetic Robotics Lab at Massachusetts Institute of Technology (MIT) with Prof. Sangbae Kim. Prior to that, I was engaged in agile motion imitation from limited demonstrations and intrinsic skill exploration with Prof. Georg Martius at the Autonomous Learning Group at Max Planck Institute for Intelligent Systems (MPI-IS), Tübingen, Germany.
My research interests focus on algorithms that can enable autonomous agents to acquire complex behaviors through learning, especially general-purpose methods that could enable any autonomous system to learn to solve any task. On legged robots particularly, I am thrilled to apply these techniques to achieve animal-level agility and naturalness.
- Reinforcement Learning
- Developmental Robotics
- Legged Intelligence
PhD in Artificial Intelligence
ETH AI Center
MSc in Robotics, Systems and Control
ETH Zurich
BSc in Mechanical Engineering
Tongji University