Analysis, Design and Implementation of a Bio-inspired Passive Tail for Amphibious Robots
 The Passive Tail and Test Setup
The Passive Tail and Test SetupDescription
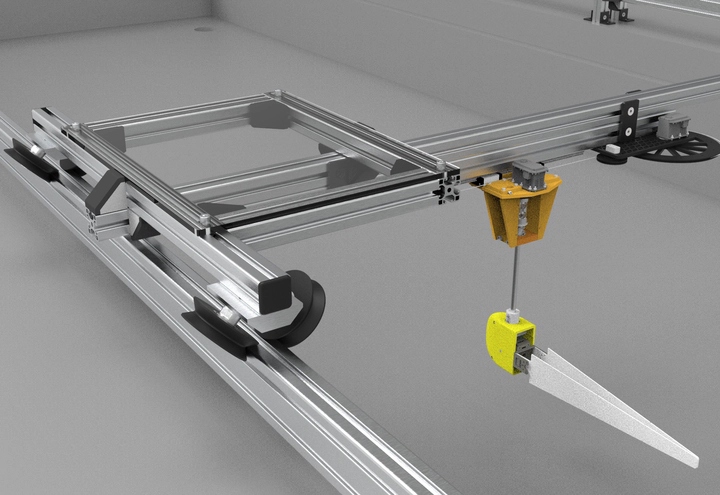
The objective of the project is to develop an appropriate chordwise stiffness distribution along a bio-inspired tail for amphibious robot systems which maximizes the propulsion generated under a combined movement of both passive heaving and pitching. In addition, a passive part of the tail test setup is built on the basis of a previous work of a pool flow system for ease of further tests and replications of aquatic locomotion in biorobotic applications.
Chenhao Li
Reinforcement Learning for Robotics
My research interests focus on the general field of robot learning, including reinforcement learning, developmental robotics and legged intelligence.