Locomotion, Perception, Localization and Path Planning for an Autonomous Mobile Robot
 Kinematic Control of Wheeled Platforms
Kinematic Control of Wheeled PlatformsDescription
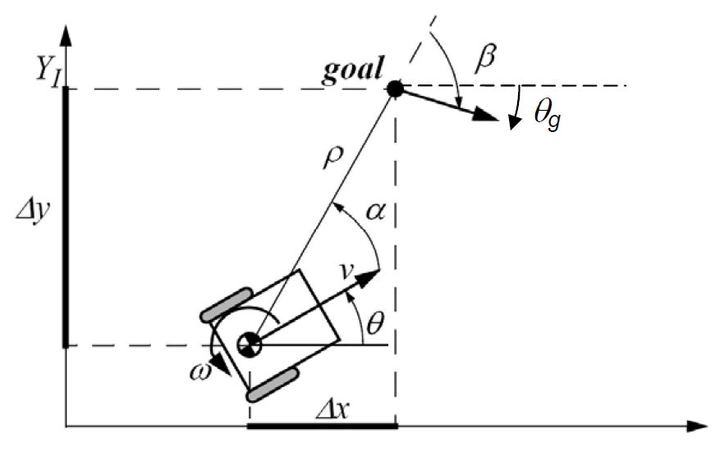
The objective of the project is to walk through the necessary algorithmic components of developing a wheeled mobile robot. For locomotion, a closed-loop motion controller is implemented to regulate wheel velocities. For perception, linear fitting and extraction from laser scans using the split-and-merge approach are used for landmark-based localization against a known map in a line-based Extended Kalman Filter framework. In addition, Simultaneous Localization And Mapping (SLAM) is implemented for autonomous map building while exploring the environment. Finally, motion planning algorithms are applied including Dijkstra’s algorithm for computing a navigation function based on a static map of the environment, and the Dynamic Window Approach (DWA) for online planning, taking into account both static and dynamic obstacles.
Chenhao Li
Reinforcement Learning for Robotics
My research interests focus on the general field of robot learning, including reinforcement learning, developmental robotics and legged intelligence.