Nonlinear Quadrotor Full Position Control
 Quadrotor
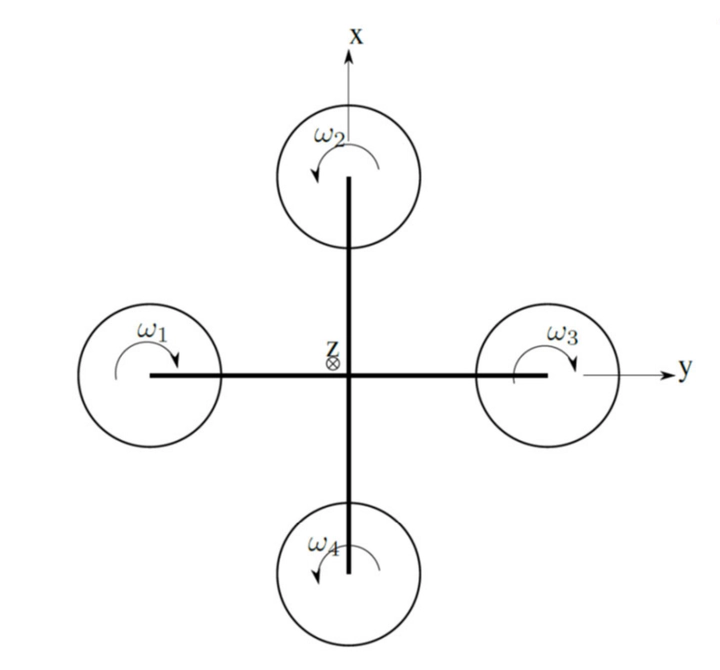
QuadrotorDescription
The objective of the project is to explore the nonlinear full position control of quadrotor systems and investigate the applicability of dynamics linearization. Quadrotors are under-actuated systems where not all states are independently controllable. When developing the control algorithms, it is generally assumed that the system operates at low speeds. In this setting, only the dominating aerodynamic forces are considered and linearization around small attitude angles (roll and pitch) is employed such that linear inputs are decoupled. In this project, control strategy with the nonlinear system dynamics is investigated to explore state space where linearized control is not applicable.
Chenhao Li
Reinforcement Learning for Robotics
My research interests focus on the general field of robot learning, including reinforcement learning, developmental robotics and legged intelligence.