State Estimation with Hybrid Extended Kalman Filter for Boat Pose Tracking
 Boat Pose Tracking Task
Boat Pose Tracking TaskDescription
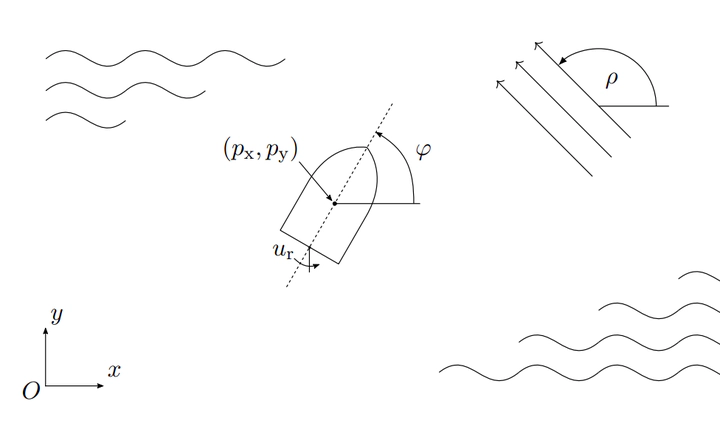
The objective of the project is to estimate the full state of a boat crossing a windy lake. The control inputs to the boat are the thrust command and the rudder command. The boat produces thrust in the longitudinal direction and is affected by hydrodynamic and aerodynamic drag. As a result, the state evolution of the boat is governed by a nonlinear continuous-time system dynamics. The boat receives position and orientation measurements from external stations affected by Gaussian noise corruption. In this project, a Hybrid Extended Kalman Filter is employed to estimate the full state of the boat given the nonlinear dynamics and noisy observations.
Chenhao Li
Reinforcement Learning for Robotics
My research interests focus on the general field of robot learning, including reinforcement learning, developmental robotics and legged intelligence.