State Estimation with Particle Filter for Mobile Robot Pose Tracking
 Robot Pose Tracking Task
Robot Pose Tracking TaskDescription
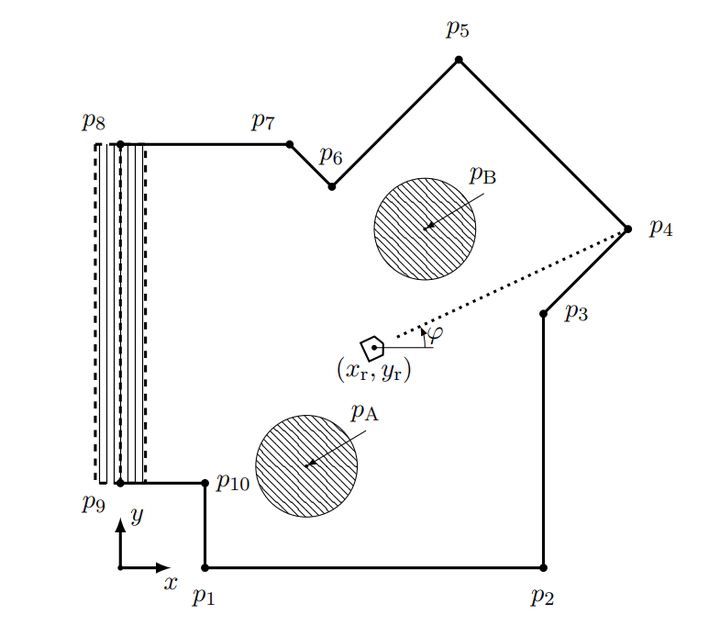
The objective of the project is to track the state of a mobile robot, which moves in a closed room with a partially known contour. A distance sensor is mounted on the robot, pointing in the same direction as the robot is heading. This sensor measures the distance between the robot and the first opposing wall straight in front of the robot. The robot is controlled with a known input, which prevents the robot from driving into any wall. In this project, a Particle Filter is employed to estimate the location and heading of the robot, as well as the offset of an uncertain wall from its nominal position given the nonlinear dynamics and noisy observations.
Chenhao Li
Reinforcement Learning for Robotics
My research interests focus on the general field of robot learning, including reinforcement learning, developmental robotics and legged intelligence.