Chenhao Li
Chenhao Li
Home
News
Publications
Projects
Experience
Talks
Platforms
Resumé
Contact
Light
Dark
Automatic
Projects
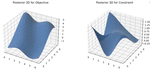
Hyperparameter Tuning with Constrained Bayesian Optimization
Joint training of model and objective with appropriate acquisition function and constraint satisfaction.
Code
Predicting Uncertainty with Bayesian Neural Networks on MNIST Dataset
Comparing classification uncertainty prediction with DenseNets and Bayesian Neural Networks.
Code
Food Taste Similarity Prediction Based on Images and Human Judgments
Learning image embeddings and distributions given relative distance labels.
Code
Medical Events Prediction with Missing Features and Imbalanced Classification
Predicting orders of medical tests, sepsis, and key vital signs based on incomplete, imbalanced data.
Code
State Estimation with Hybrid Extended Kalman Filter for Boat Pose Tracking
Tracking system states with nonlinear continuous-time dynamics with Hybrid Extended Kalman Filter.
Code
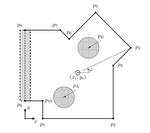
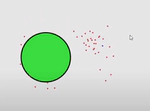
State Estimation with Particle Filter for Mobile Robot Pose Tracking
Tracking system states with general nonlinear system and general noise distributions with Particle Filter.
Code
Wheeled Platform Integration for Search and Rescue Applications
Developing algorithmic components for a wheeled autonomous mobile platform that operates autonomously in search and rescue scenarios.
Boids Behavior Control
Developing control algorithms that simulate the flocking behavior of Boids.
Code
Video
Constrained Rigid Body Simulation and Impulse-based Collision Modeling
Simulating rigid body dynamics by solving the equations of motion and impulse-based collisions with restitutional contact.
Code
Video
Inverse Kinematics Locomotion Control for a Legged Robot
Finding desired joint angles in trajectory tracking problems with inverse kinematic control.
Code
Video
«
»
Cite
×