Symmetry-Guided Memory Augmentation for Efficient Locomotion Learning
Apr 25, 2025· ,,,·
0 min read
,,,·
0 min read
Kaixi Bao
Chenhao Li
Yarden As
Andreas Krause
Marco Hutter
 Symmetry-Guided Memory Augmentation
Symmetry-Guided Memory AugmentationAbstract
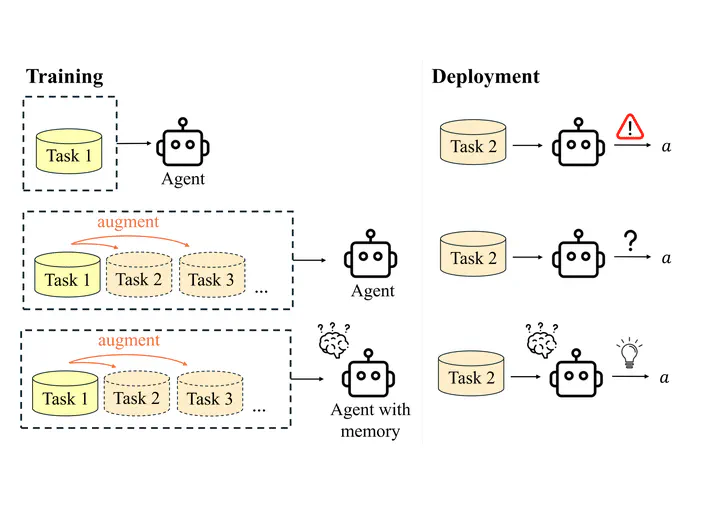
Training reinforcement learning (RL) policies for legged locomotion often requires extensive environment interactions, which are costly and time-consuming. We propose Symmetry-Guided Memory Augmentation (SGMA), a framework that improves training efficiency by combining structured experience augmentation with memory-based context inference. Our method leverages robot and task symmetries to generate additional, physically consistent training experiences without requiring extra interactions. To avoid the pitfalls of naive augmentation, we extend these transformations to the policy’s memory states, enabling the agent to retain task-relevant context and adapt its behavior accordingly. We evaluate the approach on quadruped and humanoid robots in simulation, as well as on a real quadruped platform. Across diverse locomotion tasks involving joint failures and payload variations, our method achieves efficient policy training while maintaining robust performance, demonstrating a practical route toward data-efficient RL for legged robots.
Type
Publication
In arXiv