
Uncertainty-Aware Robotic World Model Makes Offline Model-Based Reinforcement Learning Work on Real Robots
We propose a model-based reinforcement learning method for robust policy optimization in robotics from offline data.
Jan 1, 2026

Robotic World Model: A Neural Network Simulator for Robust Policy Optimization in Robotics
We propose a model-based reinforcement learning method for robust policy optimization in robotics.
Dec 1, 2025
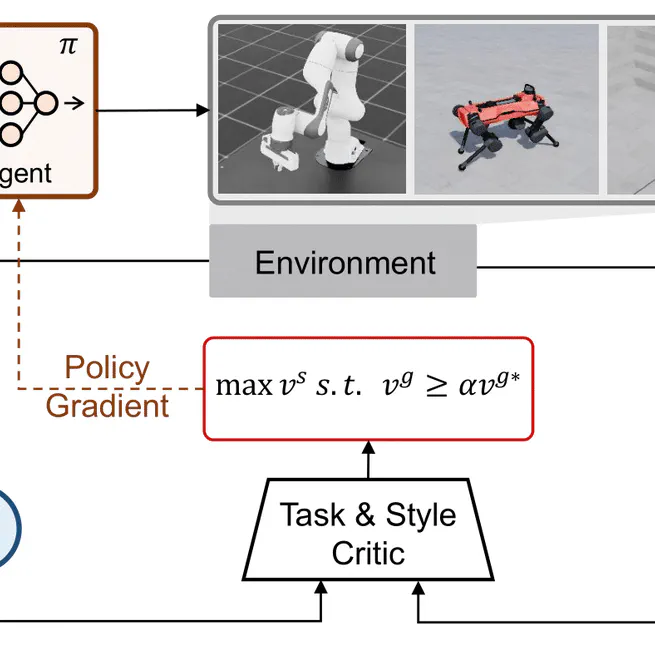
Constrained Style Learning from Imperfect Demonstrations under Task Optimality
We propose a constrained style learning approach that balances task performance and stylistic imitation.
Jul 10, 2025
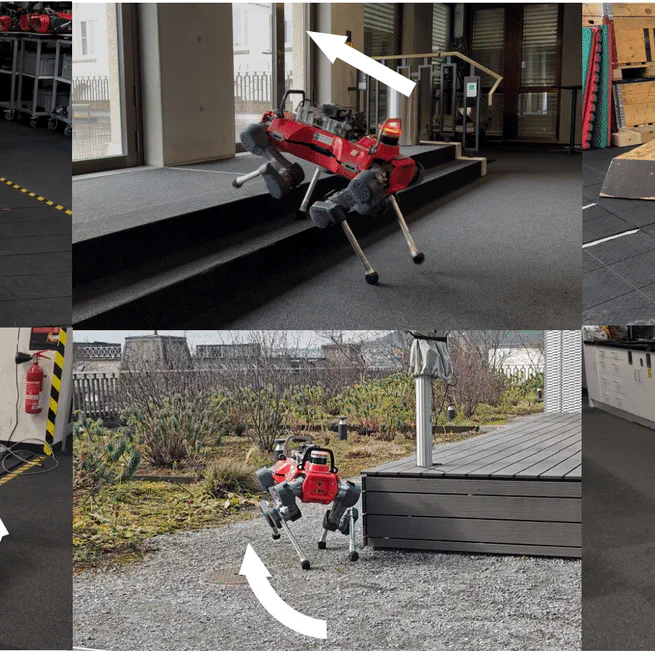
Motion Priors Reimagined: Adapting Flat-Terrain Skills for Complex Quadruped Mobility
We propose a hierarchical reinforcement learning method that extends flat-terrain skills for complex terrain navigation.
Jul 1, 2025
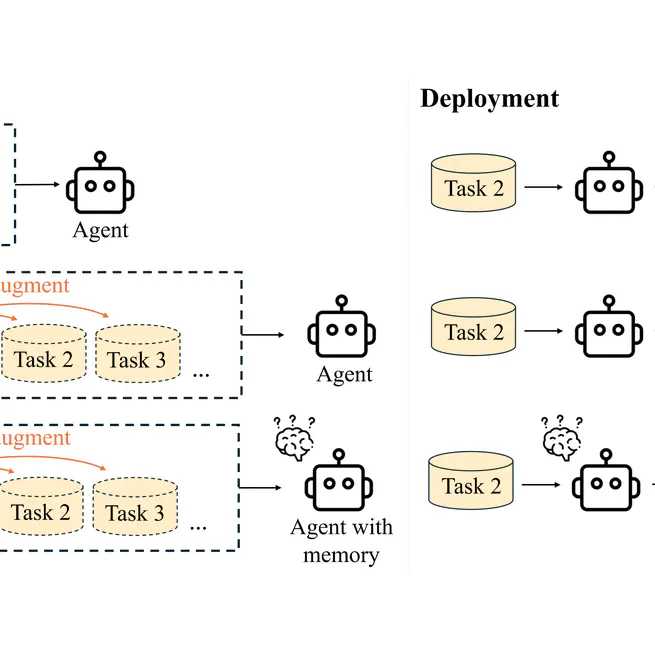
Toward Task Generalization via Memory Augmentation in Meta-Reinforcement Learning
We propose a memory-enhanced meta-reinforcement learning method that extends OOD generalization for RL agents.
Apr 25, 2025
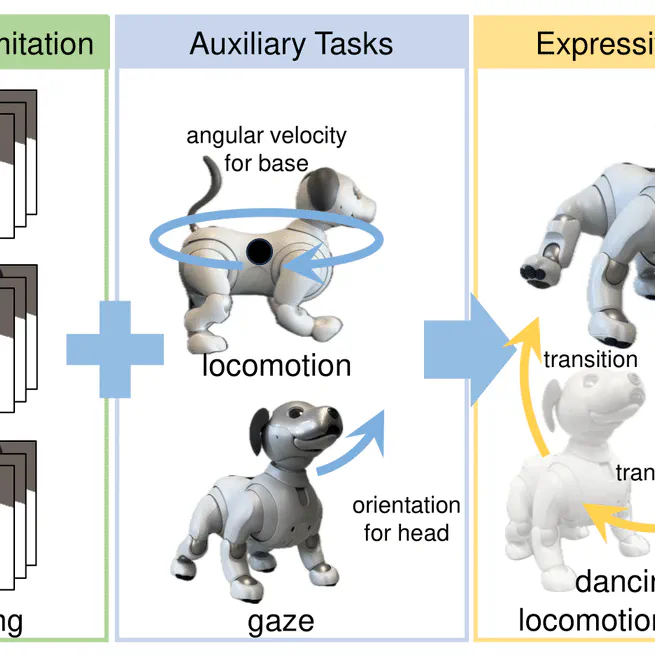
DFM: Deep Fourier Mimic for Expressive Dance Motion Learning
We propose an efficient motion representation method with frequency-domain parameterizations that enable expressive policy learning.
Jan 27, 2025
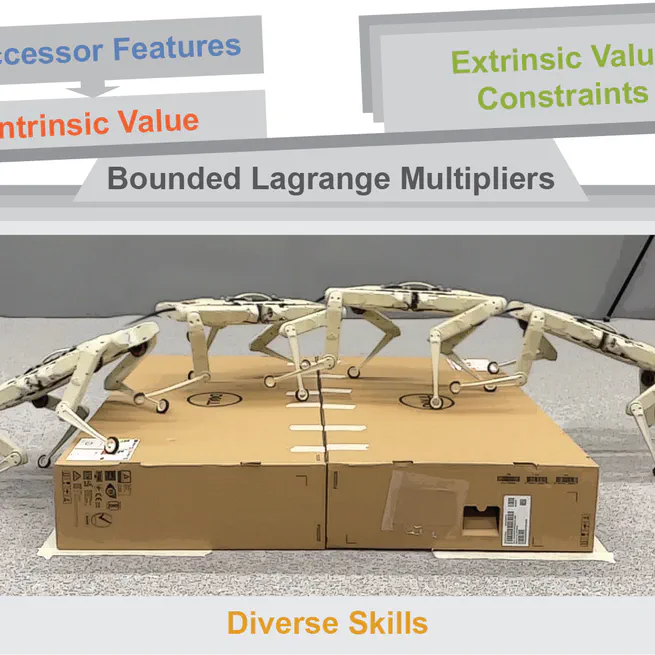
Learning Diverse Skills for Local Navigation under Multi-constraint Optimality
We propose a constraint grouping method for diversity optimization maintaining near optimality.
May 13, 2024
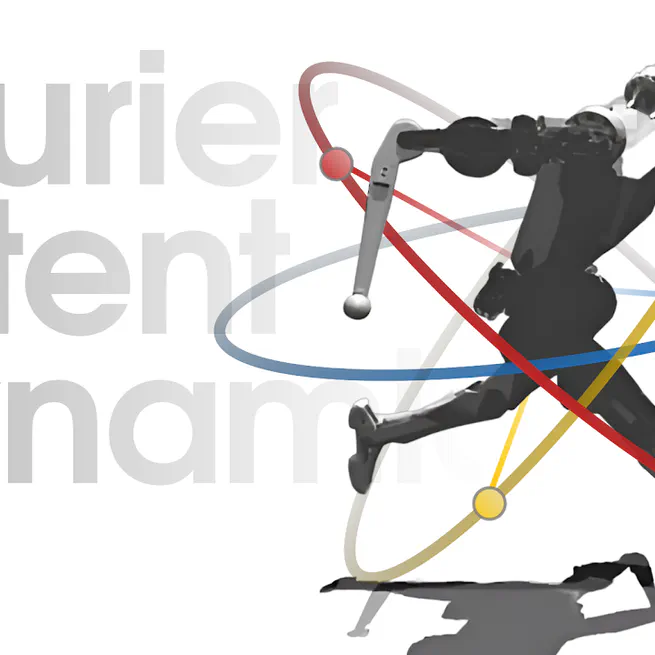
FLD: Fourier Latent Dynamics for Structured Motion Representation and Learning
We propose a self-supervised, structured representation and generation method that extracts spatial-temporal relationships in periodic or quasi-periodic motions.
Sep 1, 2023
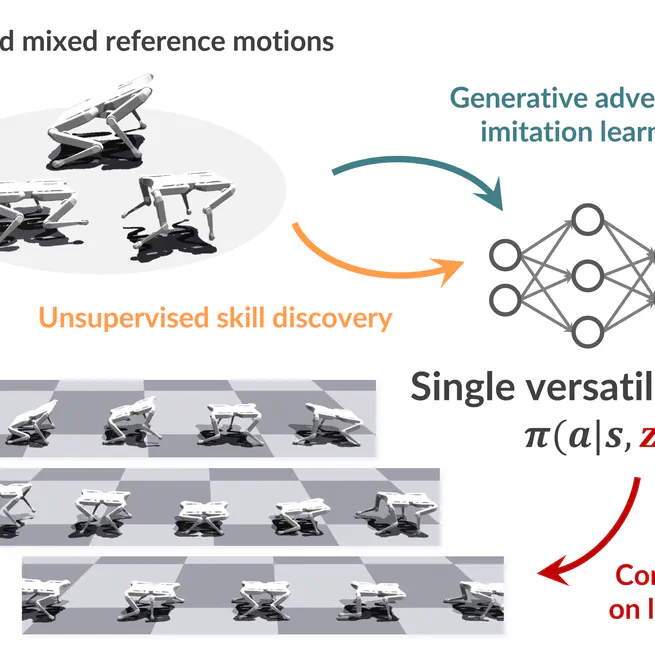
Versatile Skill Control via Self-supervised Adversarial Imitation of Unlabeled Mixed Motions
We propose a cooperative generative adversarial method for obtaining controllable skill sets from unlabeled datasets containing diverse state transition patterns.
Sep 15, 2022

Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
We propose a generative adversarial method for inferring reward functions from partial and potentially physically incompatible demonstrations for successful skill acquirement where reference or expert demonstrations are not easily accessible.
Jun 15, 2022