Chenhao Li
Chenhao Li
Home
News
Publications
Projects
Experience
Talks
Platforms
Resumé
Contact
Light
Dark
Automatic
Classic Control
State Estimation with Hybrid Extended Kalman Filter for Boat Pose Tracking
Tracking system states with nonlinear continuous-time dynamics with Hybrid Extended Kalman Filter.
Code
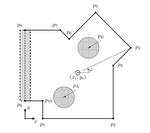
State Estimation with Particle Filter for Mobile Robot Pose Tracking
Tracking system states with general nonlinear system and general noise distributions with Particle Filter.
Code
Wheeled Platform Integration for Search and Rescue Applications
Developing algorithmic components for a wheeled autonomous mobile platform that operates autonomously in search and rescue scenarios.
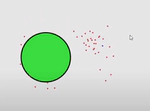
Boids Behavior Control
Developing control algorithms that simulate the flocking behavior of Boids.
Code
Video
Constrained Rigid Body Simulation and Impulse-based Collision Modeling
Simulating rigid body dynamics by solving the equations of motion and impulse-based collisions with restitutional contact.
Code
Video
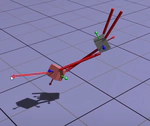
Inverse Kinematics Locomotion Control for a Legged Robot
Finding desired joint angles in trajectory tracking problems with inverse kinematic control.
Code
Video
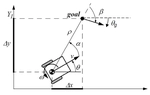
Locomotion, Perception, Localization and Path Planning for an Autonomous Mobile Robot
Developing algorithmic components for autonomous mobile robot integration.
Code
Mechanical Simulation and Soft Manipulation of a Soft Bar with the Finite Element Method
Applying the Finite Element Method to simulate the mechanical properties of a soft bar applied with constraints and external forces.
Code
Video
Trajectory Optimization of a Spaceship with Direct Single Shooting and Direct Transcription
Optimizing trajectories of a spaceship hitting a target and orbiting a planet in a space gravity field.
Code
Nonlinear Quadrotor Full Position Control
Developing nonlinear control of position and yaw angle for quadrotor systems.
Code
»
Cite
×