Chenhao Li
Chenhao Li
Home
News
Publications
Projects
Experience
Talks
Platforms
Resumé
Contact
Light
Dark
Automatic
Robotics
Boids Behavior Control
Developing control algorithms that simulate the flocking behavior of Boids.
Code
Video
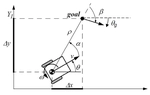
Inverse Kinematics Locomotion Control for a Legged Robot
Finding desired joint angles in trajectory tracking problems with inverse kinematic control.
Code
Video
Locomotion, Perception, Localization and Path Planning for an Autonomous Mobile Robot
Developing algorithmic components for autonomous mobile robot integration.
Code
Trajectory Optimization of a Spaceship with Direct Single Shooting and Direct Transcription
Optimizing trajectories of a spaceship hitting a target and orbiting a planet in a space gravity field.
Code
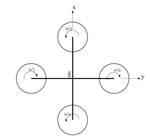
Nonlinear Quadrotor Full Position Control
Developing nonlinear control of position and yaw angle for quadrotor systems.
Code
Solving Bellman Equations in a Stochastic Shortest Path Problem of Package Delivery
Comparing computational complexity of deriving the optimal cost and control policy using value iteration, policy iteration and linear programming algorithms in a discrete infinite horizon setting.
Code
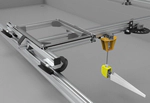
Analysis, Design and Implementation of a Bio-inspired Passive Tail for Amphibious Robots
Developing an appropriate chordwise stiffness distribution along a bio-inspired tail for amphibious robot systems which maximizes the propulsion generated under a combined movement of both passive heaving and pitching.
Video
«
Cite
×